Охлаждаемый тепловизионный модуль TI-500M
- Описание
- Спецификации
- Скачать документацию
TI-500M - это компактный охлаждаемый тепловизор с разрешением матрицы 640×512 пикселей, работающий в средневолновом ИК диапазоне. Этот прибор предназначен для использования в оптико-электронных системах различного типа и назначения. Данная тепловизионная камера способна давать чёткое изображение объектов, находящихся на дальних дистанциях, при плохих условиях видимости или в полной темноте, также она оснащена оптической системой с тремя переключаемыми полями зрения.
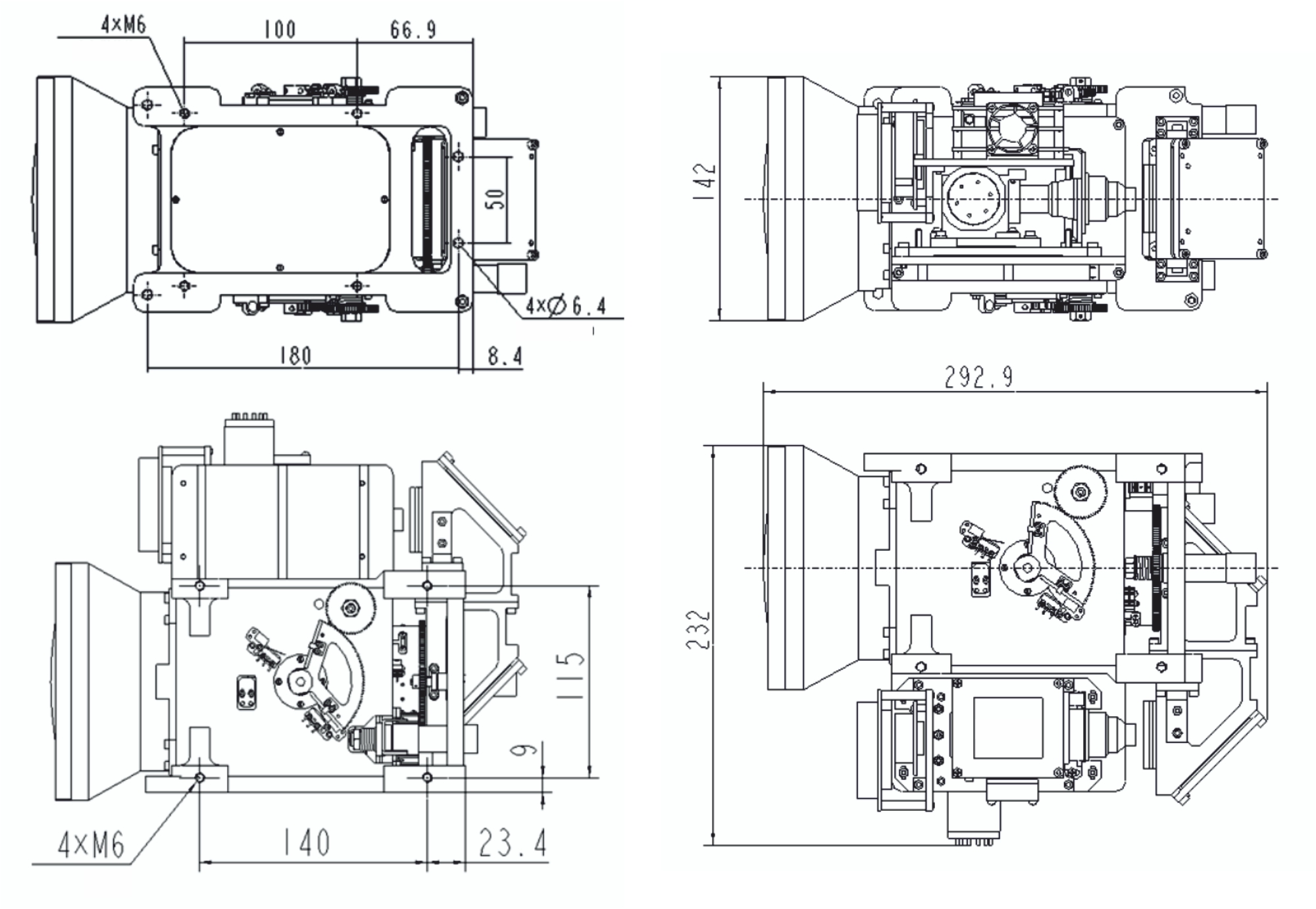
Габаритный чертёж
Основные технические характеристики
| Тип ИК детектора | КРТ |
| Тип охлаждения матрицы | МКС Стирлинга |
| Разрешение матрицы, пиксели | 640 × 512 |
| Размер пикселя, мкм | 15 × 15 |
| Спектральный диапазон, мкм | 3 - 5 |
| Макс. фокусное расстояние, мм | 500 |
| Диапазон фокусировки, м | от 10 / 20 до бесконечности |
| Поле зрения, ° (FOV) | WFOV: 18,2 × 14,6
MFOV: 3,7 × 2,9 NFOV: 1,10 × 0,88 |
| Согласованность оптической оси, ° | ≤ 0,15 |
| Коэффициент пропускания, % | ≥ 70 |
| Количество дефектных пикселей, % | ≤ 0,5 |
| Чувствительность (NETD), мК | ≤ 30 (при +25°С) |
| Передаточная функция модуляции (MTF), п/мм | 16 |
| Время криостатирования, мин. | ≤ 8 (при +25°С) |
| Коррекция неравномерности (NUC), % | ≤ 3 |
| Основные функции управления | коррекция неравномерности (NUC);
масштабирование; поляризация изображения; автоматическая и ручная регулировка усиления и яркости; регулировка времени интеграции; замена дефектных пикселей; автоматическая фокусировка; вывод данных о времени работы и температуре; включение и выключение прицельной сетки |
| Функции самотестирования | состояние системы охлаждения,
температура окружающей среды, состояние оптических механизмов |
| Интерфейс управления | RS 422 |
| Аналоговый видеовыход | Camera Link (CCIR/PAL) |
| Цифровой видеовыход | LVDS |
| Рабочее напряжение, В | 28 ± 2 (постоянный ток) |
| Потребляемая мощность, Вт | ≤ 70 |
| Габаритные размеры, мм | 293 × 142 × 232 |
| Масса, кг | 5,6 ± 0,2 |
| Диапазон рабочих температур, °С | от -30 до +65 |
| Температура хранения, °С | от -40 до +70 |
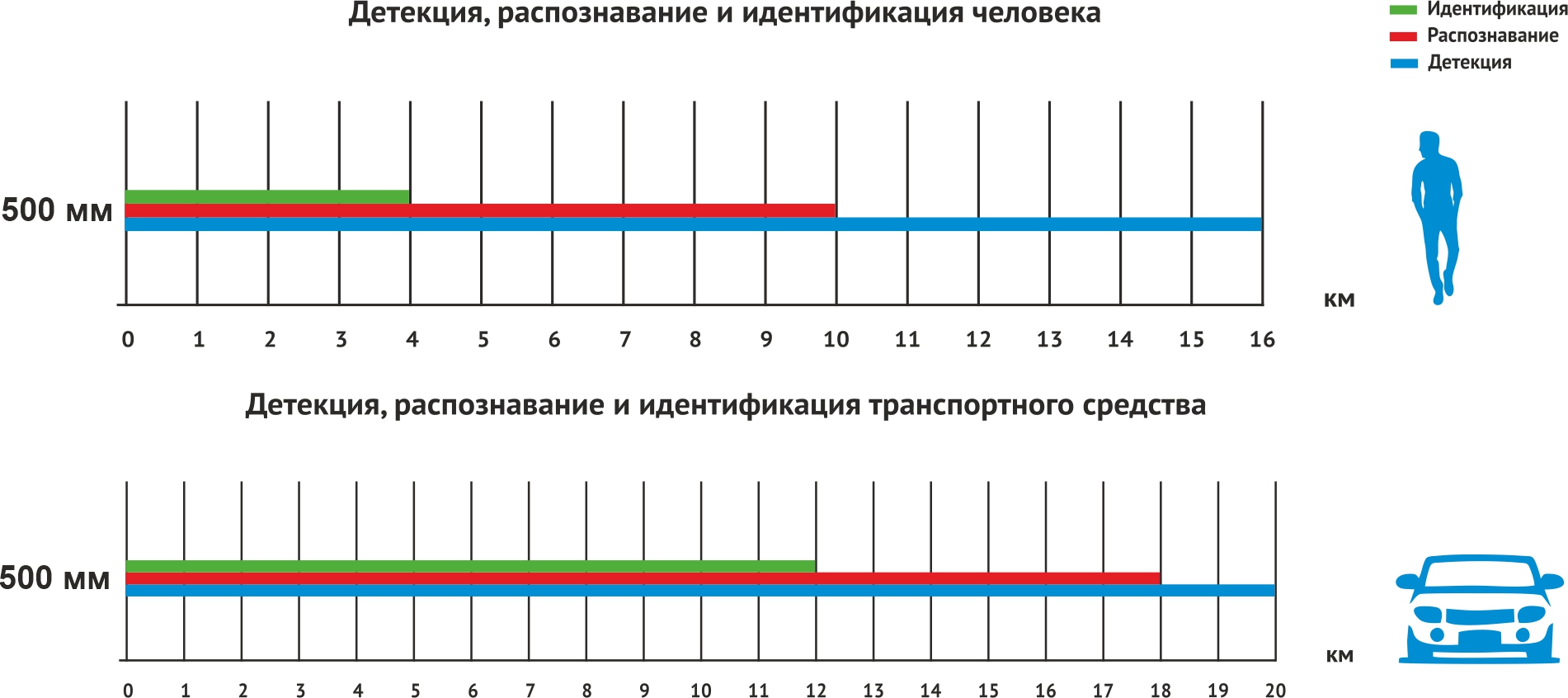
Расстояние обнаружения целей