Бюджетная серия MINS50 на МЭМС компонентах низкой точности (угол тангажа ± 90 °, угол крена ± 180 °; частота обновления данных – 100 Гц; разрешение измерений гироскопа – 0,01 °; рабочее напряжение – 5 В).
| Модель | Статическая точность, ° | Динамическая точность, ° | Точность удержания курса, °/10с | Дрейф нуля гироскопа, °/ч | Диапазон измерения акселерометра, g | Вывод сигнала | Габариты, мм |
| MINS50 | 0,1 | 3 | 0,5 | 150 | ± 16 | RS232/RS485/TTL | 55 × 37 × 24 |
| MINS55 | 0,1 | 3 | 0,5 | 150 | ± 2 | CAN | 55 × 37 × 24 |
| MINS57 | 0,1 | 3 | 0,5 | 150 | ± 16 | RS232/RS485/TTL | 55 × 37 × 24 |
Серия MINS100/200/300/400/500 на МЭМС компонентах средней точности (угол тангажа ± 90 °, угол крена ± 180 °; частота обновления данных – 500 Гц; разрешение измерений гироскопа и статическая точность – 0,01 °; рабочее напряжение – 9-36 В).
| Модель | Динамическая точность, ° | Точность удержания курса, °/60с | Дрейф нуля гироскопа, °/ч | Диапазон измерения акселерометра, g | Вывод сигнала | Габариты, мм |
| MINS100 | 1 | 0,5 | 30 | ± 1,8 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS125 | 1 | 0,5 | 30 | ± 1,8 | CAN | 60 × 59 × 29 |
| MINS125E | 1 | 0,5 | 30 | ± 2 | CAN (EMC IV) | 97 × 63 × 27,2 |
| MINS125ED | 1 | 0,5 | 30 | ± 2 | CAN (EMC IV × 2) | 102 × 57,75 × 27 |
| MINS127 | 1 | 0,5 | 30 | ± 3,6 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS200 | 0,5 | 0,3 | 20 | ± 1,8 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS225 | 0,5 | 0,3 | 20 | ± 1,8 | CAN | 60 × 59 × 29 |
| MINS225E | 0,5 | 0,3 | 20 | ± 2 | CAN (EMC IV) | 97 × 63 × 27,2 |
| MINS225ED | 0,5 | 0,3 | 20 | ± 2 | CAN (EMC IV × 2) | 102 × 57,75 × 27 |
| MINS227 | 0,5 | 0,3 | 20 | ± 3,6 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS300 | 0,3 | 0,1 | 15 | ± 1,8 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS325 | 0,3 | 0,1 | 15 | ± 1,8 | CAN | 60 × 59 × 29 |
| MINS325E | 0,3 | 0,1 | 15 | ± 2 | CAN (EMC IV) | 97 × 63 × 27,2 |
| MINS325ED | 0,3 | 0,1 | 15 | ± 2 | CAN (EMC IV × 2) | 102 × 57,75 × 27 |
| MINS327 | 0,3 | 0,1 | 15 | ± 3,6 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS400 | 0,2 | 0,1 | 10 | ± 1,8 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS425 | 0,2 | 0,1 | 10 | ± 1,8 | CAN | 60 × 59 × 29 |
| MINS425E | 0,2 | 0,1 | 10 | ± 2 | CAN (EMC IV) | 97 × 63 × 27,2 |
| MINS425ED | 0,2 | 0,1 | 10 | ± 2 | CAN (EMC IV × 2) | 102 × 57,75 × 27 |
| MINS427 | 0,2 | 0,02 | 10 | ± 3,6 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS500 | 0,1 | 0,1 | 5 | ± 1,8 | RS232/RS485/TTL | 60 × 59 × 29 |
| MINS525 | 0,1 | 0,1 | 5 | ± 1,8 | CAN | 60 × 59 × 29 |
| MINS525E | 0,1 | 0,1 | 5 | ± 2 | CAN (EMC IV) | 97 × 63 × 27,2 |
| MINS525ED | 0,1 | 0,1 | 5 | ± 2 | CAN (EMC IV × 2) | 102 × 57,75 × 27 |
| MINS527 | 0,1 | 0,01 | 5 | ± 3,6 | RS232/RS485/TTL | 60 × 59 × 29 |
Серия MINS600 на МЭМС компонентах высокой точности (угол тангажа ± 90 °, угол крена ± 180 °; частота обновления данных – 1000 Гц; разрешение измерений гироскопа – 0,01 °; рабочее напряжение – 5 В).
| Модель | Статическая точность, ° | Динамическая точность, ° | Точность удержания курса, °/60с | Дрейф нуля гироскопа, °/ч | Диапазон измерения акселерометра, g | Вывод сигнала | Габариты, мм |
| MINS600 | 0,03 | 0,05 | 0,005 | 1 | ± 60 | RS422 | 44,8 × 38,6 × 24,8 |
| MINS610 | 0,03 | 0,05 | 0,005 | 5 | ± 60 | RS422 | 44,8 × 38,6 × 24,8 |
Серия MINS700/800/900 на ВОГ (угол тангажа ± 90 °, угол крена ± 180 °; частота обновления данных – 400 Гц; разрешение измерений гироскопа – 0,01 °; диапазон измерения акселерометра – ±30 g; вывод сигнала - RS422).
| Модель | Статическая точность, ° | Динамическая точность, ° | Дрейф нуля гироскопа, °/ч | Рабочее напряжение, В | Габариты, мм |
| MINS700 | 0,05 | ≤ 0,5 | 0,1 | 12-24 | 70 × 65× 50 |
| MINS710 | 0,05 | ≤ 1 | 0,2 | 12-24 | 70 × 65× 50 |
| MINS720 | 0,1 | ≤ 2 | 0,3 | 12-24 | 70 × 65× 50 |
| MINS730 | 0,15 | ≤ 2,5 | 0,5 | 12-24 | 70 × 65× 50 |
| MINS800 | 0,01 | ≤ 0,3 | 0,05 | 12-24 | 97,3 × 90 × 70 |
| MINS810 | 0,05 | ≤ 0,4 | 0,08 | 12-24 | 97,3 × 90 × 70 |
| MINS820 | 0,07 | ≤ 0,5 | 0,1 | 12-24 | 97,3 × 90 × 70 |
| MINS830 | 0,1 | ≤ 0,6 | 0,1 | 12-24 | 97,3 × 90 × 70 |
| MINS900 | 0,005 | ≤ 0,1 | 0,02 | 12-30 | 100 × 100 × 100 |
| MINS910 | 0,01 | ≤ 0,2 | 0,03 | 12-30 | 100 × 100 × 100 |
| MINS920 | 0,01 | ≤ 0,2 | 0,03 | 12-30 | 100 × 100 × 100 |
| MINS930 | 0,02 | ≤ 0,3 | 0,05 | 12-30 | 100 × 100 × 100 |
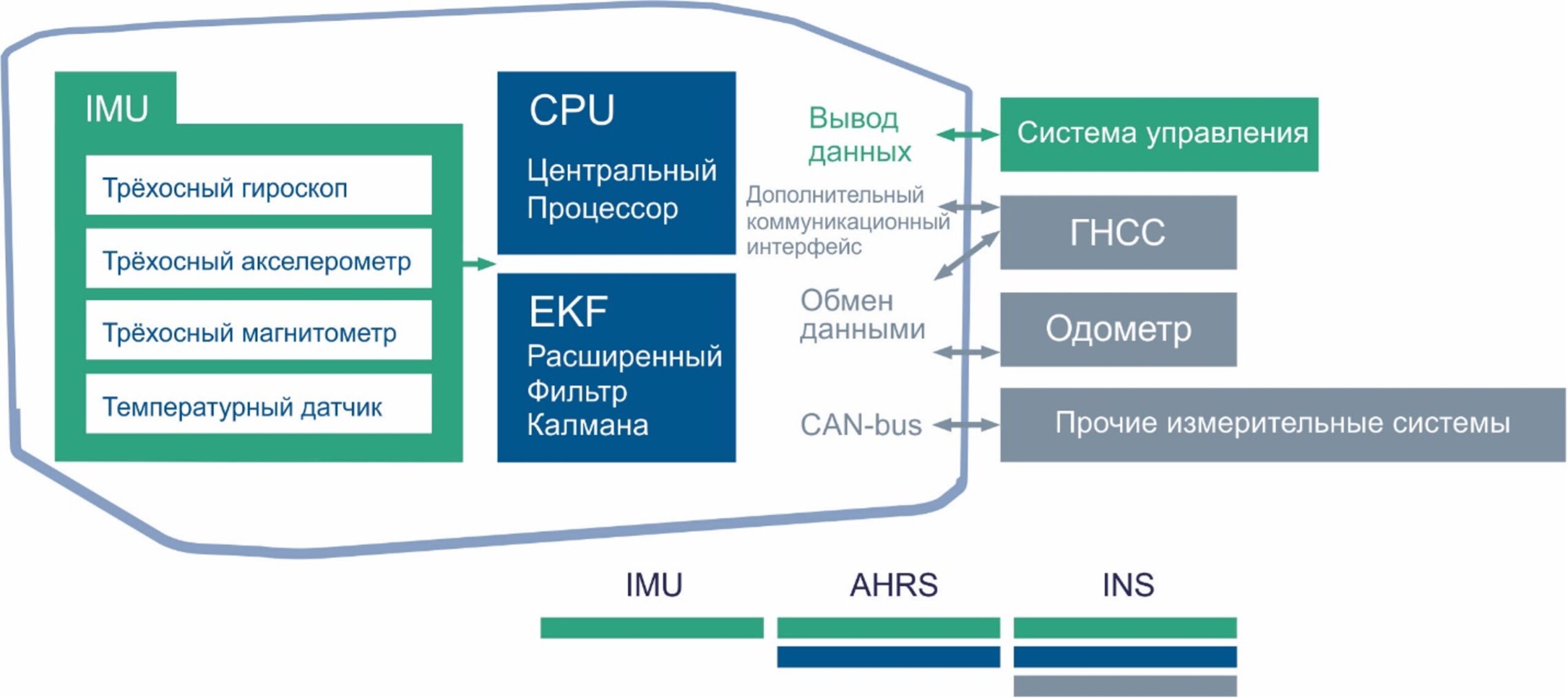
Впервые понятие Micro INS (Micro Inertial Navigation System) было применено компанией «Rockwell Collins» (США) в 2012г. по отношению к разработанной ими БИНС (Бесплатформенная Инерциальная Навигационная Система) авиационного типа, которая была построена на МЭМС (Микроэлектромеханические Системы) компонентах. Данное понятие подразумевает под собой прибор, имеющий компактную архитектуру и предназначенный для автоматического вычисления углов рыскания, крена и тангажа своего носителя, используя информацию о его ускорении и угловой скорости. В настоящее время, исходя из общемировой практики создания микроинерциальных навигационных систем, МИНС структурно можно разделить на три уровня:
На данный момент при производстве МИНС преимущественно применяются две основные технологии – это либо МИНС на МЭМС гироскопах и акселерометрах, либо МИНС на волоконно-оптических компонентах. МИНС на МЭМС компонентах имеет более компактные массогабаритные характеристики, а также расширенный набор коммуникационных интерфейсов, что является важными факторами при эксплуатации на малогабаритных носителях. Однако критическое значение нулевого смещения гироскопа не позволяет использовать этот тип МИНС в течении сколько-нибудь продолжительного периода времени, что ограничивает возможности носителя данного прибора по выполнению поставленных задач, поэтому в этом случае применяются МИНС на ВОГ.
Ваша заявка отправлена
Ваш отзыв получен.
