
Системы наведения ракет малой и средней дальности
Практически все типы современных ракет обладают теми или иными средствами навигации и наведения на цель. Выбор конкретных видов систем наведения диктуется основными тактико-техническими характеристиками (ТТХ) ракетной техники и её конкретным назначением.
Общая классификация ракет малой и средней дальности и используемых на них систем наведения
Согласно ранее существовавшему «Договору о ликвидации ракет средней и меньшей дальности» (ДРСМД) между СССР и США, радиус действия ракет малой дальности определяется от 150 до 500км, а зона поражения ракет средней дальности – от 500 до 5000 км. Как известно, по своему классу ракеты также подразделяются на «воздух-воздух», «поверхность-поверхность», «воздух-поверхность» и «поверхность – воздух». Кроме того, исходя из лётных параметров, ракеты малой и средней дальности могут быть баллистическими, которые летят по параболической траектории и управляются только за счёт изменения тяги двигателей (без аэродинамических рулей), или же крылатыми, которые имеют соответствующее аэродинамическое оперение и благодаря этому могут менять траекторию полёта. Крылатые ракеты в свою очередь обладают различной скоростью полёта и делятся на дозвуковые (скорость 0,8-0,9 Мах), сверхзвуковые (скорость 2-3 Мах) и гиперзвуковые (скорость >5 Мах).
Все перечисленные выше особенности ракет средней и малой дальности являются определяющими при выборе систем их наведения на цель:
- Электродистанционная система управления (ЭДСУ). Этот метод наведения в современных условиях фактически означает программирование ракеты перед запуском (внесение в память блока управления координат цели и следование к ним в инерциальном режиме). Чаще всего ЭДСУ применяется на гиперзвуковых ракетах, высокая скорость которых не позволяет использовать иные методы навигации.
- Командное наведение (наведение оператором). Данный тип наведения основан на передаче зашифрованных команд целеуказания в систему управления движением ракеты по радиоканалу (реже по световому лучу), при этом ракета должна находиться на линии визирования между пусковой установкой и целью (LOS), что определяется с помощью электронно-оптических систем, установленных как на командном пункте, так и на самой ракете, либо по экрану радара. Обычно командное наведение применяется в зенитно-ракетных комплексах противовоздушной обороны (ЗРК ПВО).
- Геофизическая навигация (астронавигация или навигация по наземным ориентирам). Астронавигационная система представляет собой автоматизированное оптическое устройство, осуществляющее угловые измерения известного положения звезд и использующая их для расчета положения ракеты в пространстве. Такой тип навигации больше подходит для баллистических ракет с высокой траекторией полёта, а для крылатых ракет, летящих всего в нескольких сотнях метров над земной поверхностью, наиболее актуальной является система ориентации на основе сопоставления рельефа местности с цифровыми картами и коррекция траектории полёта по опорным точкам на ней (система автоматического распознавания). Последнее требует установки специализированного приборного комплекса в составе бортовой оптико-электронной системы круглосуточного и всепогодного наблюдения, а также радиолокационных и барометрических высотомеров.
- Инерциально-спутниковая навигация. Наведение ракеты на цель с использованием инерциальной навигационной системы (ИНС) с корректировкой координат по спутниковому сигналу, либо же по сигналу с наземной станции слежения. Такая система наведения используется на многих видах ракет большой дальности в независимости от их целевого назначения.
- Самонаведение на цель. Этот способ навигации ракет подразумевает их полную автономность и наличие на борту приборов, обеспечивающих точное попадание без внешнего вмешательства и какой-либо коррекции со стороны. Системы самонаведения ракет могут работать в активном, полуактивном и пассивном режиме и подразделяются на радиолокационные, электронно-оптические (в том числе лазерные), тепловые и разноканальные. В современных ракетах малой и средней дальности системы самонаведения как правило размещаются в их головной части и представляют собой т.н. головки самонаведения (ГСН).
В наиболее сложных бортовых навигационных ракетных комплексах могут применяться сразу несколько видов систем наведения (например ИНС и ГСН). Далее будут рассмотрены отдельные типы навигационных приборов, позволяющих осуществлять наведение на цель ракет средней и малой дальности.
Инерциальные системы наведения ракет малой и средней дальности
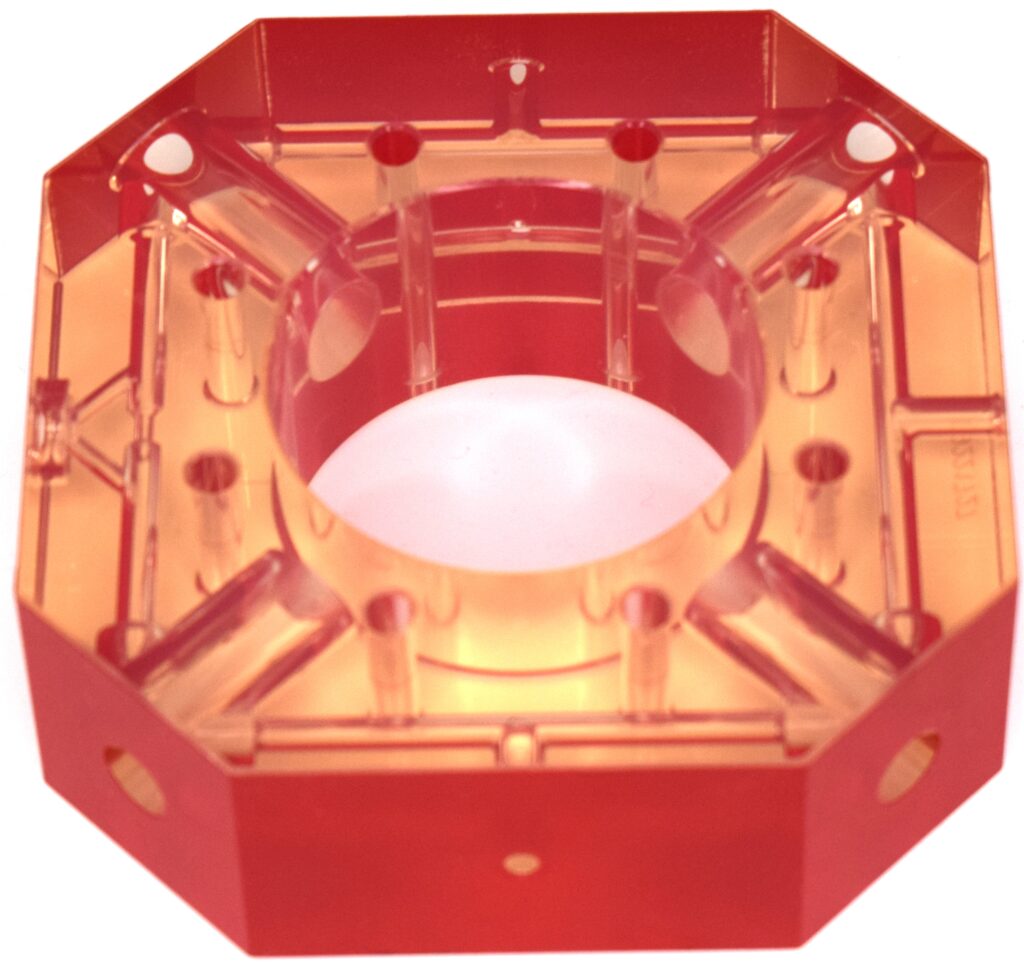
Практически во всех ракетах малой и средней дальности присутствует трёхосный инерциальный измерительный модуль (IMU) в составе трёх гироскопов и трёх акселерометров, который позволяет стабилизировать положение ракеты в полёте по трём координатам (рыскание, крен и тангаж). Обычно IMU, устанавливаемые в таких ракетах, построены на базе кольцевых лазерных гироскопов (КЛГ) на основе эффекта Зеемана:
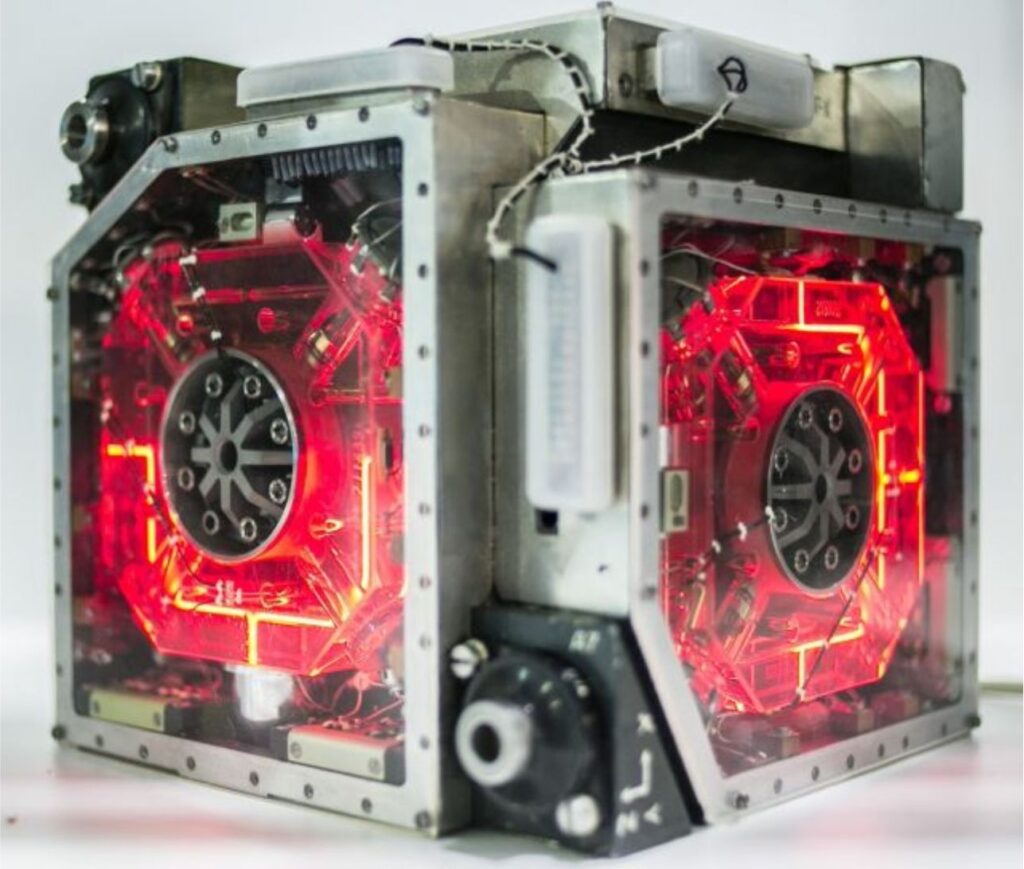
Эти гироскопы имеют резонаторы из оптического ситалла, что обеспечивает необходимый уровень помехозащищённости по крайней мере на дозвуковых скоростях:
Однако только часть ракет малой и средней дальности оснащены полноценными бесплатформенными инерциальными навигационными системами (БИНС) тактического класса (нулевой дрейф в таких системах составляет не более 0,1°/ч), которые позволяют ракете полноценно наводится на цель в инерциальном режиме, при этом такие ИНС зачастую корректируются по спутниковым данным или по данным с наземной станции слежения в определённый временной период. Таким образом инерциальное наведение ракеты подразумевает наличие интегрированной (инерциально-спутниковой) навигационной системы работающей по слабосвязанной схеме обработки сигнала.
Головки самонаведения (гсн) ракет малой и средней дальности
Первые системы самонаведения ракет начали разрабатываться практически сразу после окончания Второй Мировой Войны, однако первые ГСН появились только в 50-е гг. (это были тепловые датчики, т.е. ИК ГСН). Идея размещения систем самонаведения в головной части ракеты оказалась очень удачной и в последующем приобрела большую популярность. В настоящее время существуют следующие виды ГСН:
1. Радиолокационные ГСН (РЛГСН). Они в свою очередь подразделяются на активные ГСН (ARH), которые преимущественно устанавливаются на ракеты «воздух-воздух»; полуактивные ГСН (SARH) носителями которых в основном являются ракеты «поверхность-воздух» и ГСН на основе пассивного бистатического радара, т.е. пассивные ГСН (PBR), устанавливаемые на ракеты «воздух-поверхность».
2. Уже упомянутые выше ИК ГСН, которые наводятся по теплу исходящему от цели. Современная ИК ГСН представляет собой оптико-электронный прибор, предназначенный не только для выделения цели на окружающем тепловом фоне, но и для её идентификации и измерения её угловой скорости, а также для передачи в автоматическое прицельное устройство (АПУ) сигнала её захвата.
3. Оптические ГСН. Оптическое наведение подразумевает наличие в контуре ГСН полноценной оптико-электронной системы, состоящей из одного или нескольких каналов визуализации, работающих в различных диапазонах спектра (от УФ до ИК). Для возможности наведения на цель в тёмное время суток в оптических ГСН применяется компактный тепловизионный канал, который как правило представляет собой неохлаждаемый тепловизионный модуль длинноволнового ИК диапазона:

Оптическое наведение в большинстве таких ГСН происходит в основном с участием оператора, однако сейчас уже разрабатываются полностью автономные системы электронно-оптического наведения ракет на основе нейросетевых алгоритмов видеоанализа.
4. Лазерные ГСН (ЛГСН). ЛГСН принимает отражённое от цели излучение лазера коротковолнового ИК диапазона, определяет её угловые координаты и вырабатывает команды манёвра для бортовой системы управления. Также как и РЛГСН, ЛГСН делятся на активные (лазерный излучатель и фото-приёмное устройство (ФПУ) находятся внутри ГСН), полуактивные (излучатель находится во внешнем носителе, а внутри ГСН расположено только ФПУ) и пассивные (наводятся на лазерное излучение приборов, установленных на объекте прицеливания). Наиболее современные активные ЛГСН построены на основе систем лазерного сканирования (LiDAR):
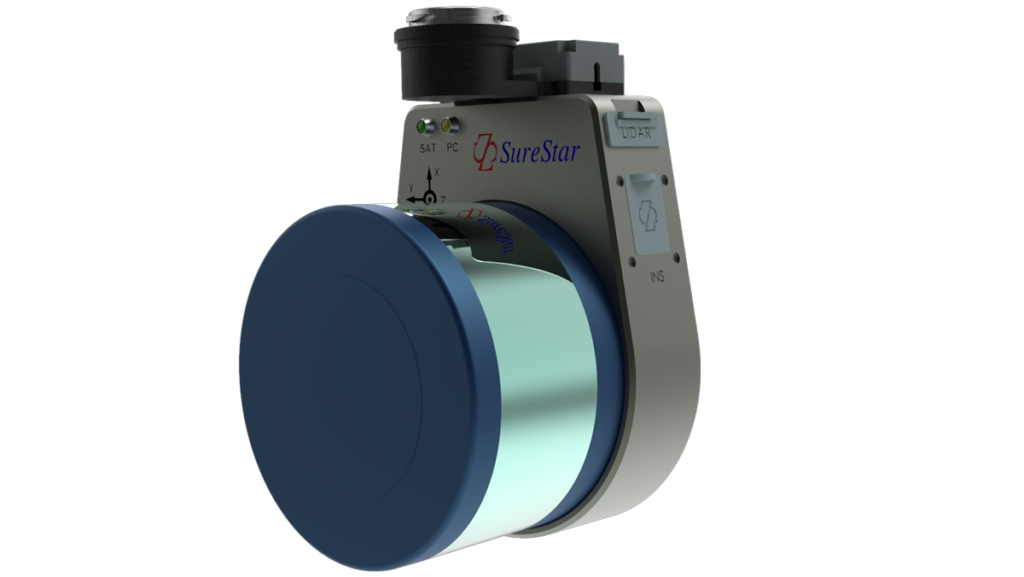
Такие ЛГСН могут не только определять местоположение цели и расстояние до неё, но и идентифицировать цели, а также устанавливать их приоритетность, что включает в себя возможность перенацеливания.
5. Комбинированные ГСН, совмещающие в себе сразу несколько каналов самонаведения (например, тепловое, радиолокационное и лазерное самонаведение), которые могут как дублировать друг друга для повышения надёжности системы самонаведения в целом, так и включаться попеременно в зависимости от дистанции до цели.
Основным преимуществом ГСН является полная автоматизация процесса наведения на цель, а главным недостатком – слабая помехоустойчивость зондирующего сигнала, что заставляет искать методы повышения надёжности ГСН, одним из которых может быть совмещение их работы с иными способами наведения (например, с инерциальным или геофизическим наведением).
Перспективы развития систем наведения ракет малой и средней дальности
- Установка на сверхзвуковые крылатые ракеты вместо устаревших моделей ИНС на КЛГ, более технологичных и помехоустойчивых ИНС на волоконно-оптических гироскопах (ВОГ) тактического класса точности:

- Замена ИНС на КЛГ в гиперзвуковых носителях на более устойчивые к перегрузкам ИНС, которые построены на основе твердотельных волновых гироскопов (ТВГ) с кварцевыми резонаторами, либо на основе ядерных магнитно-резонансных гироскопов (ЯМРГ).
- Применение РЛГСН нового типа с использованием плоских или конформных фазированных антенных решеток, которые выполнены с применением технологий визуализации и цифровой обработки инверсной сигнатуры цели.
- Использование в активных ЛГСН вместо обычных лазерных излучателей и ФПУ систем трёхмерного лазерного сканирование (LiDAR), что позволяет не только определять расположение целей и расстояние до них, но и идентифицировать эти цели.
- Проектирование мультиспектральных оптических ГСН с системой полностью автоматического целеуказания на основе встроенных в блок управления ракеты алгоритмов нейросетевого видеоанализа.
- Создание многоканальных активно-пассивных ГСН, например тепловизионно- радиолокационных или тепловизионно-лазерно-радиолокационных.
- Внедрение комбинированных систем наведения, состоящих из нескольких навигационных компонентов, например сочетание ИНС и ГСН.