Системы подводного видения
Термин «системы подводного видения» обычно подразумевает под собой обозначение некоего приборного комплекса, предназначенного для визуализации подводных объектов (как статических, так и динамических), находящихся на различной глубине. Как правило основной задачей такой визуализации является получение изображения, несущего исчерпывающую информацию о подводном объекте. Однако, с учётом оптических свойств подводной среды, выполнение данной задачи сталкивается с целым рядом препятствий, которые мы далее рассмотрим подробнее.
Оптические свойства подводной среды
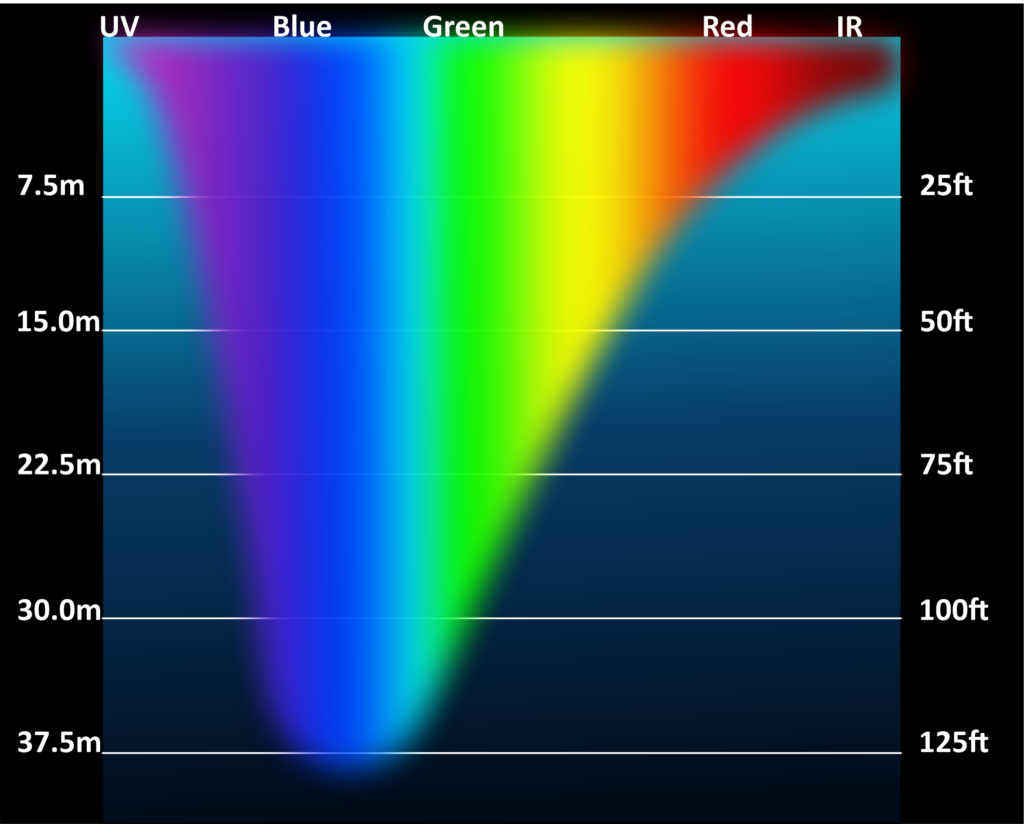
Для начала рассмотрим пропускаемость водной среды для электромагнитных волн различных диапазонов. Таблица с этими данными приведена ниже.
Таблица поглощения оптического излучения в чистой воде¹
| Спектральный диапазон | Средняя длина волны, нм | Глубина поглощения, м |
| Ультрафиолетовый | 300 | 25 |
| Фиолетовый | 400 | 100 |
| Синий | 475 | 275 |
| Зелёный | 525 | 110 |
| Жёлтый | 575 | 50 |
| Оранжевый | 600 | 60 |
| Красный | 685 | 5 |
| Инфракрасный | 800 | 3 |
Как видно из этих данных, волны ИК диапазона в водной среде почти полностью поглощаются либо отражаются уже на поверхности, глубина проникновения волн УФ диапазона также не велика, лучшими показателями проникновения обладают волны видимого диапазона (фиолетовый, синий и зелёный цвета). Однако следует помнить, что в реальной (не идеально чистой) воде пропускаемость оптического излучения скорее всего будет ещё ниже:
Помимо пропускаемости водной среды для электромагнитных волн оптического диапазона необходимо ещё учитывать и её прозрачность (мутность). Так по данным гидрофотометрии наилучшая прямая видимость достигается в южных (тропических морях), а наихудшими показателями в этом плане обладают воды Северного полушария.
При проектировании подводных оптических приборов также нужно иметь в виду эффект двойного преломления (оптический сигнал, доходя до входной линзы такого прибора, преломляется дважды с различными коэффициентами – один раз при заходе из воздушной среды в водную, а второй раз на границе водной среды и стекла входной линзы):
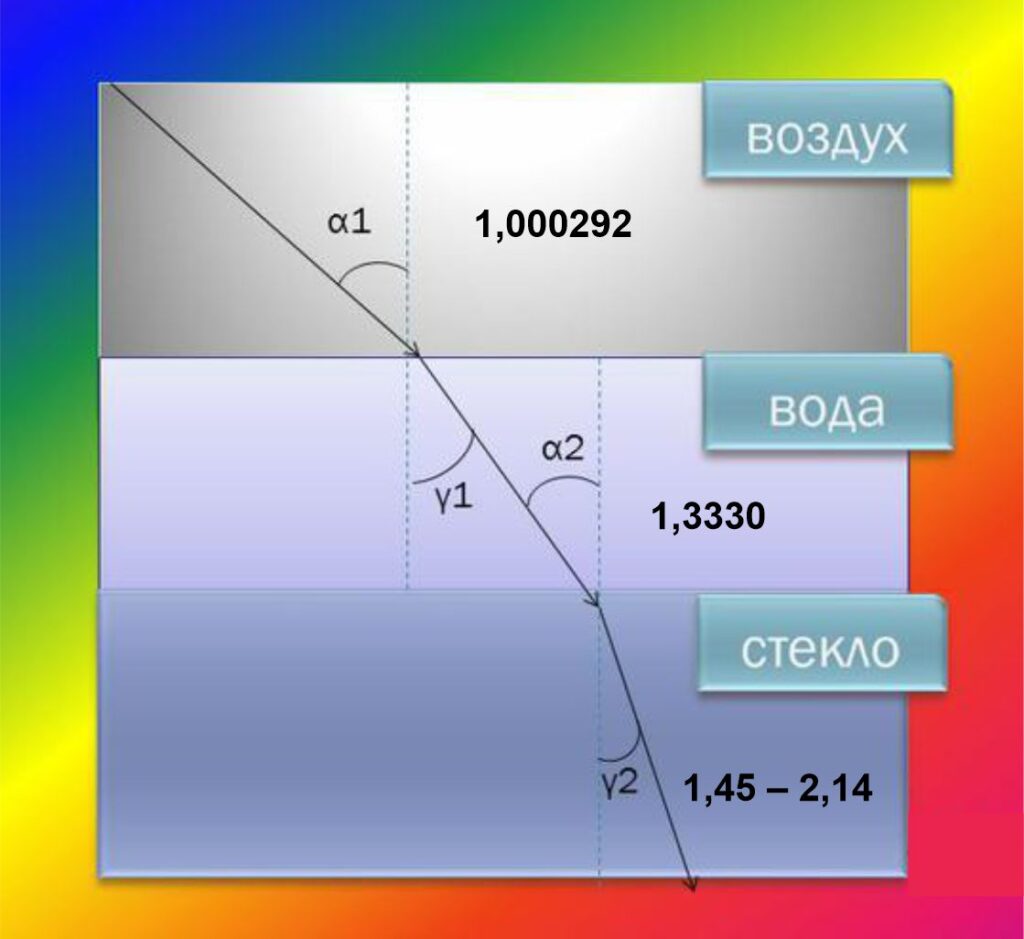
Таким образом, неправильный расчёт оптических показателей может повлечь за собой не только искажение визуального восприятия местоположения подводного объекта (дистанции до него), но и создать ложные представления о его размерах.
Далее нами будут рассмотрены различные типы подводных телевизионных и видеосистем.
Системы подводного телевидения и глубоководные видеокамеры
Системы подводной киносъёмки имеют достаточно давнюю историю, родоначальником которой был легендарный Жак-Ив Кусто ещё в конце 1940-х гг., затем в 50-60-х гг. прошлого века появились подводные телевизионные камеры, которые могли передавать сигнал на поверхность по кабельному соединению практически в режиме реального времени (с небольшой временной задержкой). На тот момент сенсоры таких приборов (телевизионные трубки) представляли собой различные разновидности видиконов (один из типов электронно-оптического преобразователя). Также подводные телевизионные системы подразделялись на активные, которые имели подсветку и пассивные, которые могли передавать изображение при естественном подводном освещении. Подсветка первоначально формировалась чаще всего из простых ламп накаливания (позднее cтали использоваться галогенные источники освещения). Сейчас подобные приборы построены на основе современных КМОП (CMOS) матриц с большой чувствительностью и специальными алгоритмами обработки сигнала:

А в качестве подсветки для таких приборов используются LED прожектора с высокой интенсивностью излучения:

В результате длительного опыта конструирования подводных телевизионных систем были определены основные особенности их эксплуатации. Так было установлено, что мощные источники подсветки (приблизительно 1 кВт) с большой площадью покрытия пригодны для использования только в относительно прозрачной воде. Там, где вода не достаточно прозрачная, лучше применять несколько ламп направленного действия небольшой мощности (например, по 150 Вт), так как мощные источники света в малопрозрачной воде вызывают помеху обратного рассеяния, что снижает яркостный контраст подводных объектов и ухудшает условия их наблюдения. Лучше всего в данной ситуации показывают себя импульсные источники подсветки (стробоскопы или импульсные лазеры видимого диапазона).
Что же касается основных свойств самой подводной оптической системы, то она должна обеспечивать достаточно большой сектор обзора, но не вносить больших дополнительных потерь света и не снижать контраста подводных объектов, а также, как уже говорилось выше, учитывать коэффициенты преломления света в подводной среде.
Важной особенностью глубоководных сенсоров является хорошая цветопередача. Запись цветовых (RGB) и яркостных сигналов (YUV) там происходит в стандарте субдискретизации насыщенности 4:4:4. Это означает, что для каждого пикселя кроме яркости сохраняется и его цвет, в то время как обычные цифровые камеры точно сохраняют только яркостные характеристики, а цветоразностные сигналы для соседних точек считаются одинаковыми и аппроксимируются по различным алгоритмам в формате 3:1:1. Благодаря специализированным КМОП (CMOS) матрицам подводного применения появляется возможность получать чёткое изображение объектов при низком уровне освещённости и низком контрасте.
Возможным перспективным направлением развития систем подводного видения может стать использование приборов связанных с эффектом т.н. черенковского излучения (самосвечение заряженных частиц, двигающихся в водной среде со сверхсветовой скоростью). Это могут быть как сверхсветовые детекторы, так и системы сверхсветовой подсветки.
В настоящее же время помимо подводных телевизионных и видеокамер всё большее распространение получают подводные системы лазерного сканирования (LiDAR) или системы лазерной локации, с помощью которых можно получить двух или трёхмерное изображение подводного объекта.
Подводные системы лазерного сканирования
Как и прочие подводные оптические приборы, системы лазерного сканирования имеют ряд особенностей, которые отличают их от аналогичных устройств, используемых в атмосфере:
- Центральная длина волны определяется в соответствии с диапазоном пропускания оптических волн в подводной среде (50нм – 275нм), также для батиметрических систем лазерного сканирования важна возможность перестройки рабочей длины волны;
- Для подводных лазеров также важен импульсный режим излучения с высокой частотой повторения импульсов, составляющий десятки кГц;
- При этом необходима малая длительность излучения импульсов (не более 50 нс) и их передних фронтов (не более 10 нс);
- Нужна достаточно высокая энергия импульса излучения (1-10 мДж) и соответствующая ей высокая средняя мощность;
- Рекомендуется иметь хорошую стабильность энергии импульса излучения (не хуже 20%);
- Ну и естественно, подводные лазеры характеризуются малой дивергенцией (угловая расходимость пучка выходного излучения), которая находится в пределах 11 мрад.
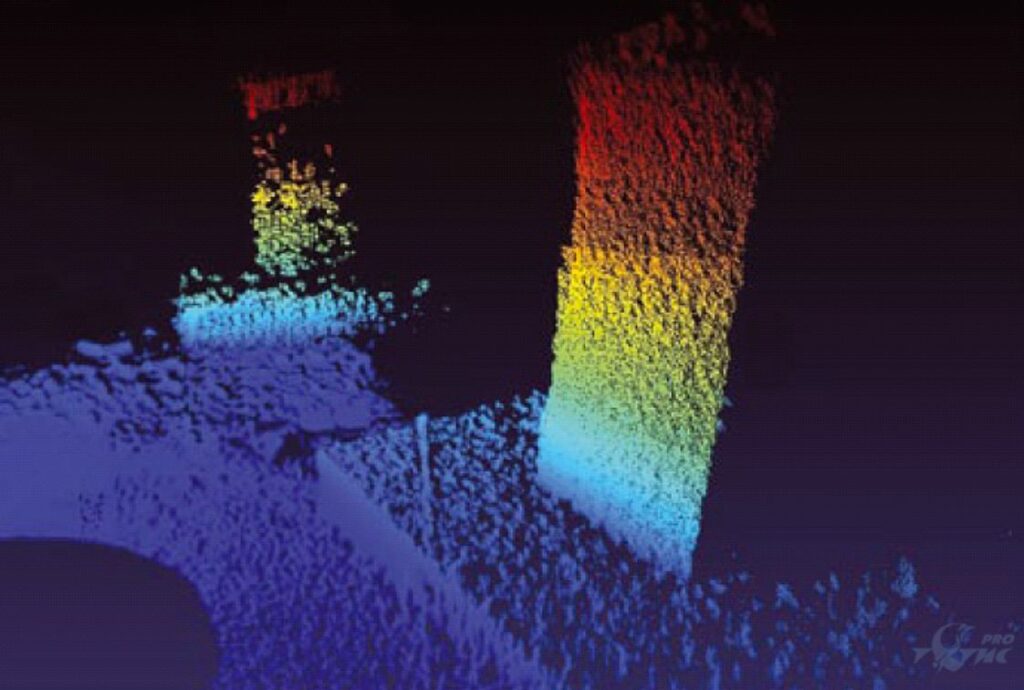
На практике в подводной среде себя хорошо зарекомендовали лазерные излучатели на иттрий-алюминиевом гранате с неодимом с рабочей длиной волны 532 нм (зелёный луч), что обеспечивает получение высокоточного изображения подводных объектов в зависимости от степени прозрачности воды в радиусе 2,5-38 м. Разрешающая способность лучших образцов таких систем лазерного сканирования на глубине 7,5м составляет 0,3 см , а на глубине 30м – не хуже 1,2 см.
Особое место среди подводных систем лазерного сканирования занимают батиметрические системы LiDAR, которые предназначены для составления карт рельефа дна при сканировании с надводных носителей, таких как различные типы плавсредств или летательные аппараты (включая БПЛА):
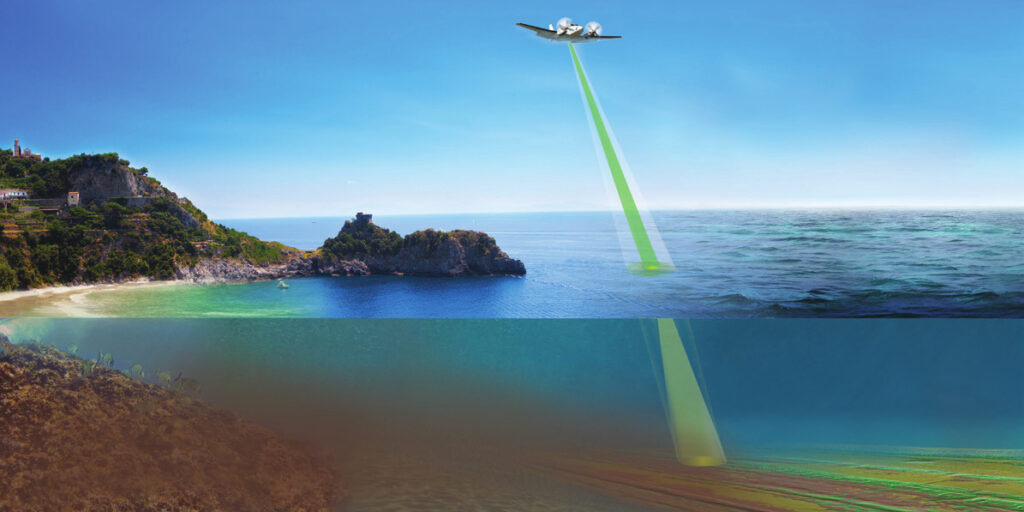
С помощью таких систем возможно сканировать не только рельеф дна, но и одновременно определять прибрежные высоты (для этого необходимо синхронное применение подводного лазерного сканера, работающего на длине волны 532нм, и обычной системы LiDAR с центральной длиной волны 1,55мкм).
Кроме специализированных видеокамер и систем лазерной локации для визуализации различных объектов в подводной среде также активно используются акустические телевизионные системы – звуковизоры, о которых речь пойдёт ниже.
Звуковизоры
Звуковизор – это устройство для получения изображения предметов при помощи ультразвуковых волн с использованием акустоэлектронного преобразователя, позволяющего акустическое изображение в форме пространственного распределения звукового давления представить в виде оптического изображения на экране.
По способу формирования характеристики направленности звукотелевизионные системы подразделяются на аналоговые и цифровые, а по её размерности – на двухмерные и трёхмерные. 2D – звуковизоры в свою очередь могут транслировать изображение по системе «угол – угол» или «угол – дистанция». Хотя звуковые волны распространяются под водой гораздо лучше световых, но системы лазерного сканирования по качеству изображения пока что превосходят акустические, поскольку минимальное разрешение по дистанции звуковизоров составляет только 1см при секторе обзора 32° х 32 °. Тем не менее, с учётом того, что ультразвуковые сканеры стоят гораздо дешевле лазерных системLiDAR, их применение вполне оправдано в тех случаях, когда речь идёт не об обнаружении и распознавании неких неизвестных подводных предметов, а о техническом контроле за существующими объектами.
Помимо самого способа формирования подводного изображения, важным элементом систем подводного видения также является тип передачи сигнала на поверхность.
Подводные системы передачи изображения
В то время как единственным способом передачи информации с наблюдательных аппаратов на многокилометровых глубинах по-прежнему остаётся их поднятие на поверхность, для глубин в несколько десятков или даже сотен метров в современных условиях существуют иные варианты трансляции изображения:
- Кабельная передача сигнала (преимущество - надёжность, недостаток - привязка к длине кабеля и конфигурации его прохождения);
- Радиоволновая передача сигнала (преимущество - простота, недостаток - короткая дистанция в виду рассеивания водой радиоволн);
- Акустическая передача сигнала, т.е. передача по звуковой волне с помощью гидрофонов различного типа модуляции (преимущество - большая дистанция с возможностью обхода некоторых препятствий, недостаток - низкая скорость);
- Оптическая передача сигнала (преимущество - высокая скорость передачи сигнала вплоть до 1 Гбит/с, недостаток - чувствительность к препятствиям).
Пока что наиболее распространённым средством связи под водой является вывод сигнала по кабельному соединению, однако самым перспективным способом передачи изображения на небольших глубинах в настоящий момент считается подводный Wi-Fi (Li-Fi):
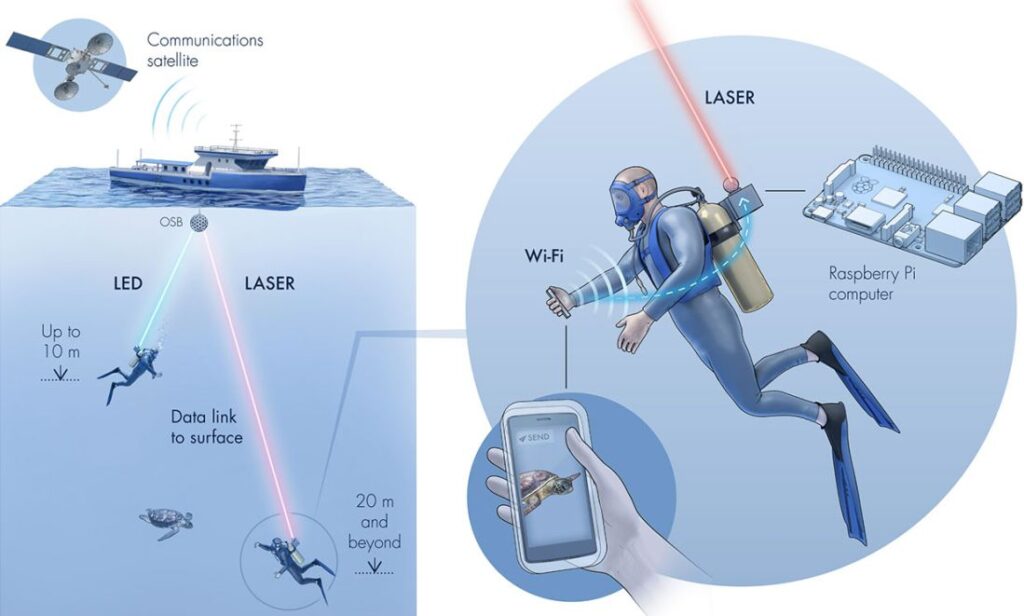
При помощи Aqua-Fi передача под водой мультимедийных файлов — изображения, звука и видео — происходит за счет светового сигнала. Со смартфона информация с помощью радиоволн передается на устройство, прикрепленное к снаряжению аквалангиста или на подводный аппарат. В качестве передатчика используется «зеленый лазер» (green beam) с длиной волны 520 нм. Это решение позволило увеличить дальность передачи информации и пропускную способность «сети». Над поверхностью воды этот сигнал улавливает фотодиод, который отправляет его на специальную микросхему, универсальный асинхронный приемопередатчик (Universal Asynchronous Receiver-Transmitter, UART). Он, в свою очередь, преобразует попадающий на фоточувствительные части приемника свет в электрический заряд и обратно. Преобразующая микросхема установлена на одноплатный мини-компьютер. Это устройство преобразует полученные звуковые и видеофайлы в серии, состоящие из фрагментов длительностью в секунду и меньше, и на высокой скорости передает их далее в импульсном режиме.
Системы подводного видения продолжают развиваться как в отношении сенсорных компонентов, так и в отношении передающей базы, что в ближайшее время гарантирует технический прогресс подводных электронно-оптических устройств и расширение сферы их применения.