Инерциальные навигационные системы: типы, достоинства, недостатки
Отсутствие надежных методов определения положения самолета в пространстве довольно долго было серьезной проблемой для авиации. Первые пилоты были вынуждены ориентироваться по солнцу, звездам, компасу, запоминать наземные ориентиры, а позднее — полагаться на радионавигационные системы. Это создавало зависимость от внешних источников информации, и вопрос разработки системы, способной работать автономно, имел большое значение.
Ситуация изменилась с появлением в 50-60-е годы XX века инерциальных навигационных систем (ИНС).
Как устроена ИНС
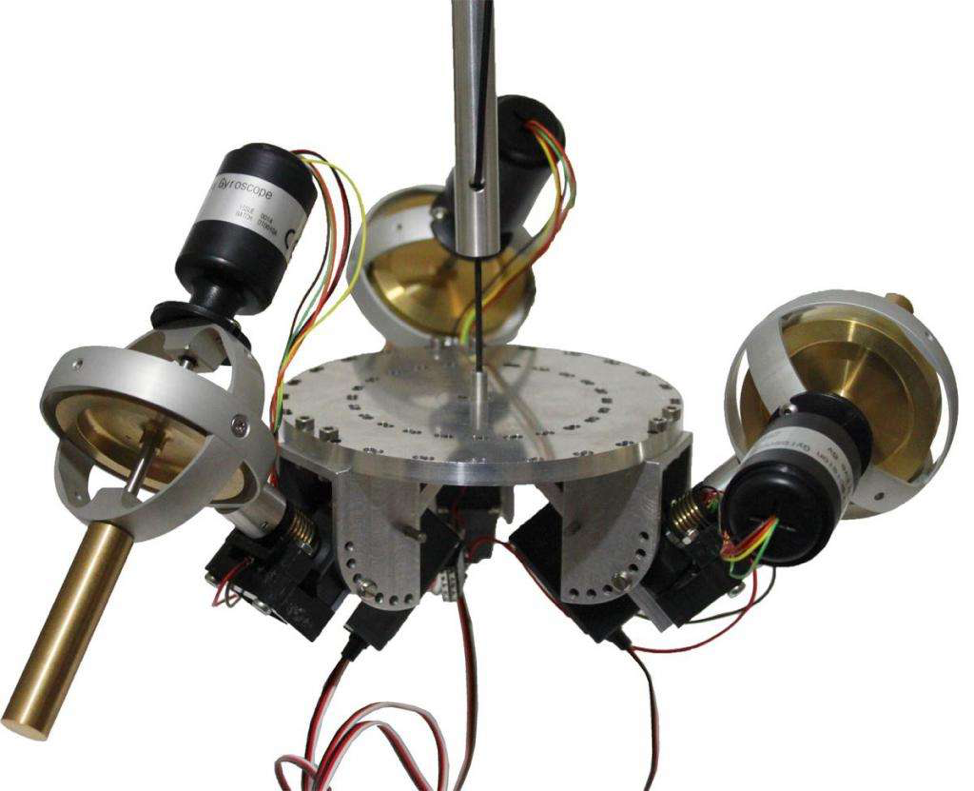
Теоретические основы работы ИНС были разработаны математиками Ляпуновым и Михайловым. Практическая реализация заключается в установке на борту летательного аппарата комплекса приборов, отслеживающих параметры полета и по ним определяющего изменение положения объекта в пространстве. В комплекс входят:
- акселерометры;
- гироскопы;
- вычислительное устройство.
Данные о линейном ускорении, рысканье, тангаже и крене поступают в вычислительное устройство, интегрируются и преобразуются в угловое отклонение координат — долготу, широту и высоту.
Типы ИНС и их особенности
Инерциальные навигационные системы бывают двух типов:
- Платформенные (ПИНС). Бывают геометрического, аналитического и полуаналитического типа. Навигационное оборудование размещается на гиростабилизированной платформе.
- Бесплатформенные (БИНС). Навигационное оборудование жестко закреплено.
В настоящее время бесплатформенные ИНС практически полностью вытеснили платформенные, хотя последние отличаются высокой точностью позиционирования и предстартовой подготовки. Но они достаточно громоздки, не универсальны, дороги и имеют сложную конструкцию.
Бесплатформенные ИНС лишены этих недостатков, а к их преимуществам относятся:
- неограниченные углы измерения;
- информативность;
- надежность;
- устойчивость к вибрациям и ударам;
- компактность;
- низкое энергопотребление;
- универсальность.
К сожалению, у БИНС есть серьезная слабость: неограниченное накопление методической ошибки и ошибки, связанной с изначальной калибровкой системы. Для устранения этого недостатка применяют физические и алгоритмические методы.
Но в первом случае БИНС частично теряют преимущества, связанные с простотой конструкции и компактностью: этот метод предполагает помещение системы на гироплатформе, датчики которой используются как для стабилизации приборов, так и для навигации.
Во втором случае частично теряется автономность ИНС, поскольку происходит ее совмещение с другими способами навигации. Такие навигационные системы называются интегрированными.
В настоящее время чаще всего происходит совмещение инерциальной навигационной системы и спутниковой. За счет внешнего сигнала в показания приборов вносится поправка, но система не теряет функциональности, когда по каким-либо причинам нет доступа к спутнику.
Заключение
При разработке навигационных систем инженеры столкнулись с двумя противоположными проблемами: обеспечением точности определения координат и автономности. Использование спутниковой или радионавигации обеспечивает наибольшую точность позиционирования объекта, но при этом демаскирует его, а при недоступности внешнего сигнала такая система теряет функциональность.
Инерционные системы навигации обеспечивают требуемую автономность, но их свойство накапливать ошибку создает много проблем при калибровке и эксплуатации.
В настоящее время наиболее удачным оказалось решение, предполагающее создание интегрированных систем навигации, когда показания ИНС корректируются за счет сигнала со спутника, а при его отсутствии или необходимости маскировки навигационное оборудование переходит в автономный режим.






