Инерциальные навигационные системы
Первые приборы для прокладки курса появились в Древнем Китае за 2600 лет до н.э., а к XXI веку были разработаны различные виды навигационных систем: радиолокационная, спутниковая, инерциальная и другие. На их развитие повлияли как соперничество между странами в сфере военных технологий, так и технологический прогресс в целом.
Имевшихся к началу XX века средств навигации было достаточно для беспрепятственного сообщения между континентами, а вот развитие авиации требовало все более совершенных систем.
Сначала на смену ориентированию по солнцу, звездам и наземным объектам пришла навигация по радиомаякам. Маяки передавали опознавательный сигнал на определенной частоте, оборудование на борту самолета принимало этот сигнал и засекало направление. Зная азимуты двух таких маяков, можно было вычислить курс.
Но маяков требовалось много. Их сигнал могли запеленговать и заглушить, а сами маяки — уничтожить, поэтому вопрос создания системы навигации, независимой от внешних источников информации, стоял очень остро.
С развитием ракетостроения и выводом на орбиту спутников появилась возможность использовать для привязки к местности спутниковый сигнал. В настоящее время системы навигации GPS и ГЛОНАСС позволяют определять положение объекта в пространстве с точностью до 1 метра и охватывают почти всю поверхность Земли.
К сожалению, спутниковые навигационные системы унаследовали недостаток своей предшественницы — радионавигации. Они также уязвимы к помехам, плохо работают на полюсах — как из-за особенностей позиционирования спутников на орбите, так и из-за активности ионосферы в этих широтах. Средства радиоэлектронной борьбы (РЭБ) могут исказить спутниковый сигнал и привести к сбою в работе навигационной аппаратуры.
Поэтому очевидно, что спутниковые системы, какими бы совершенными и точными они ни были, необходимо дублировать оборудованием, устойчивым к помехам и независимым от внешних источников информации. Инерциальные навигационные системы (ИНС), разработка которых началась во второй половине XX века, полностью отвечали этим требованиям.
Принцип работы инерциальной навигационной системы
Инерциальная навигация основана на непрерывном измерении параметров движения — ускорения и угловых скоростей — относительно установленной системы отсчета (СО). В качестве таковой могут выступать:
- произвольная СО;
- астрономические объекты (звезды);
- Земля;
- горизонт.
Для определения параметров движения используются специальные датчики: акселерометры для определения линейного ускорения и гироскопы для вычисления угловых скоростей. Поступившие с них данные обрабатываются вычислительной системой.
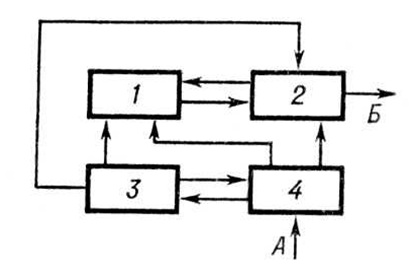
Схематично изобразить работу ИНС можно следующим образом:
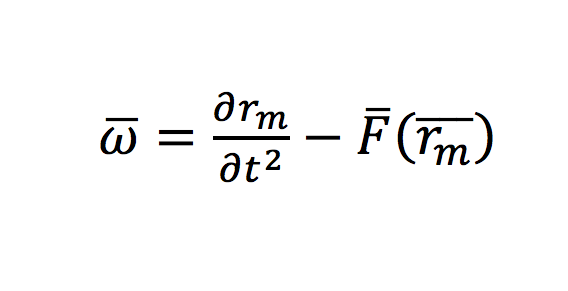
Основное уравнение для вычисления координат имеет вид:

Вычисления осуществляются по следующему алгоритму:
- В блок 4 через вход А загружаются начальные данные для калибровки навигационной системы и ориентации инерционных датчиков.
- Данные поступают в блоки 1, 2, 3.
- В блоке 3 осуществляется синхронизация с мировым временем, данные о котором поступают в блоки 1, 2 и 4.
- Блок 1 регистрирует данные об ускорении.
- В блоке 2 происходит интегрирование уравнения (1): однократное — для определения скорости, двукратное — для определения координат.
- Через выход Б осуществляется вывод информации о местоположении на местности.
Варианты исполнения инерциальных навигационных систем
Существует два варианта исполнения ИНС: платформенный и бесплатформенный. В первом случае датчики размещаются на гиростабилизированной платформе, во втором — жестко связаны с корпусом прибора.
Платформенные инерциальные навигационные системы бывают трех видов:
- геометрического;
- аналитического;
- полуаналитического.

В ПИНС геометрического типа гироскопы и акселерометры размещаются на отдельных гиростабилизированных платформах. Платформа с акселерометрами стабилизирована относительно горизонта, с гироскопами — в инерциальном пространстве (относительно далеких космических объектов). Определение координат осуществляется посредством анализа данных о взаимном расположении платформ.
В ПИНС аналитического типа датчики размещаются на одной платформе, стабилизированной в инерциальном пространстве. Координаты вычисляются по изменению положения аппарата относительно гироскопов и акселерометров.
В ПИНС полуаналитического типа платформа с датчиками стабилизирована относительно местного горизонта, а данные обрабатываются на вычислителе, расположенном вне ее.
Вариант исполнения платформенной ИНС необходимо подбирать под выполняемые летательным аппаратом задачи. Например, геометрические ПИНС имеют высокую погрешность при работе на скоростных военных самолетах и в космическом пространстве, поэтому их, как правило, устанавливали на гражданские самолеты, надводные корабли, подводные лодки, а также на тихоходные военно-транспортные самолеты и стратегические бомбардировщики. Для работы же в космическом пространстве и на истребителях использовали аналитические ПИНС.
ПИНС обладают тремя важными достоинствами:
- высокая точность измерений;
- нет нужды в пересчете из связанной системы координат в необходимую;
- высокая точность предстартовой подготовки.
Однако громоздкость исполнения, высокая стоимость и ограничения в измерении углов привели к практически полному переходу на бесплатформенные инерциальные навигационные системы (БИНС).
Бесплатформенные инерциальные навигационные системы
В последние годы беспилотные летательные аппараты (БПЛА) выполняют широкий спектр задач: от доставки грузов до аэрофотосъемки, разведки и мониторинга. Для увеличения их эффективности возникла необходимость в уменьшении массогабаритных характеристик устанавливаемых на борту приборов, в том числе и навигационной системы.

БИНС отвечают этим требованиям, но обладают невысокой точностью и склонностью к накоплению ошибки. Согласно Каперко (Каперко А. Ф., Легостаев В. Л. Классификация элементов программно-технического комплекса бесплатформенной инерциальной навигационной системы), БИНС разделяются на три класса точности, параметры которых приведены в таблице 1.
Таблица 1. Классы точности БИНС.
| Точность определения угла крена, тангажа, град/ч | Скорость накопления ошибки, м/с | |
| Низкая точность | 0,5 — 1 | <1 — 10 |
| Средняя точность | 0,1 — 0,5 | < 0,5 — 1 |
| Высокая точность | 0,01 — 0,1 | <0,01 — 0,5 |
Для гражданских квадрокоптеров достаточно систем с низкой точностью, для аппаратов крупнее, а также для решения задач навигации и ориентации используют системы средней и высокой точности.
Производство датчиков БИНС по технологиям для интегральных плат позволило создать так называемые MEMS-устройства: микроэлектромеханические системы. Это сразу же вывело навигационное оборудование на новый уровень по надежности и компактности, хотя для более точных навигационных приборов продолжают использовать волоконно-оптические и лазерные гироскопы.

Помимо надежности и компактности у БИНС есть еще ряд важных преимуществ:
- неограниченные углы измерения;
- информативность;
- устойчивость к вибрациям и ударам;
- низкое энергопотребление.
Благодаря этим факторам БИНС, в том числе и на базе МЭМС-датчиков, заняли на рынке очень прочное положение, но полностью другие способы навигации не вытеснили. Причинами послужили постоянно накапливающаяся погрешность и необходимость тщательной предполетной калибровки.
Методы компенсации недостатков БИНС
Поскольку платформенные ИНС обладают точностью, которой не хватает БИНС, то одним из самых очевидных решений будет создание гибридной системы, объединяющей в себе преимущества обоих подходов.
Если БИНС разместить на стабилизированной по двум осям платформе, используя датчики и для навигации, и для стабилизации платформы, то можно получить систему с лучшей точностью. Только она все равно получится более громоздкой, дорогой, со сложной конструкцией.
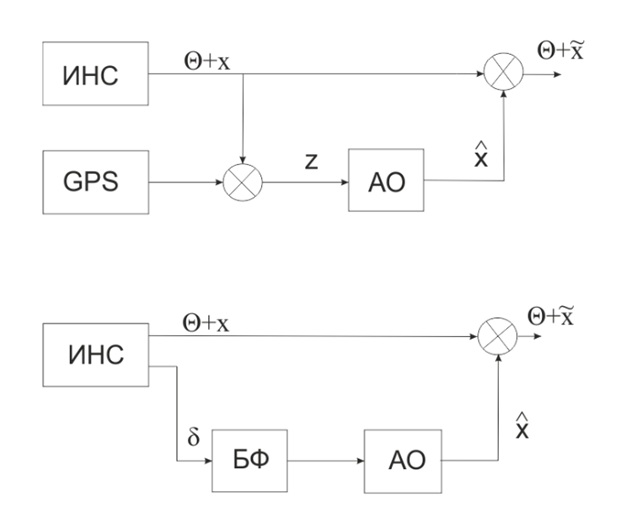
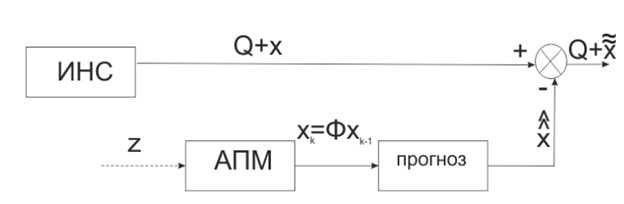
Поэтому большее распространение получили так называемые интегрированные навигационные системы, в которых ИНС объединена с другой измерительной или навигационной системой — как правило, спутниковой.
В интегрированном исполнении происходит периодический перезапуск ИНС с новыми начальными данными, полученными от спутниковой системы. При отсутствии спутникового сигнала погрешность компенсируется с помощью алгоритмов оценивания и прогнозирования.
Ситуация на рынке
Рынок инерциальных навигационных систем активно развивается во всем мире. Если в XX веке они устанавливались преимущественно на военную технику, то с 90-х годов началась их активная демилитаризация.
Сейчас ИНС применяются на гражданских судах и самолетах, в геофизике, устанавливаются на БПЛА и беспилотные автомобили, используются в передвижных дорожных лабораториях и в системах стабилизации антенн. Компании предлагают как компактные решения на базе MEMS-датчиков, свободно помещающиеся на ладони, так и более габаритные, но точные устройства на базе волоконно-оптических и лазерных гироскопов.
В нашем каталоге также представлены компоненты для ИНС: MEMS-акселерометры AS-100 и MEMS-гироскопы ЛК-МЭМС-ГИРО100. Их отличает низкое энергопотребление, миниатюрные размеры, малый температурный дрейф, устойчивость к нагрузкам и широкий диапазон рабочих температур.
Помимо комплектующих у нас представлены интегрированные навигационные системы, в том числе на базе одноосных или трехосных волоконно-оптических гироскопов. Мы предлагаем как ультра-экономные решения, так и более дорогие, но точные приборы. Подробнее можете ознакомиться с ними в каталоге.
Заключение
Современные проблемы требуют современных решений. Не стали исключением и навигационные системы. Если на заре мореплавания людям хватало простейших приборов, чтобы определить свое местоположение, то сегодня возросшие скорость и количество транспортных средств предъявляют совсем другие требования к точности навигационного оборудования.
Не меньшую роль играет обеспечение его автономности в широком диапазоне внешних условий. Инерциальные навигационные системы решают эту задачу, но при этом теряют в точности и склонны к накоплению ошибки. Ответом на этот вызов стало появление интегрированных решений, объединивших в себе достоинства обоих методов.
Дальнейшее развитие навигационных технологий будет заключаться в повышении точности датчиков и обеспечения еще большей автономности за счет совершенствования алгоритмов прогноза и оценивания.
Но уже сейчас существует широкий круг задач, для которых разработаны эффективные решения. Если вам нужна консультация по выбору навигационной системы, свяжитесь с нами по e-mail или телефону.